Next: 3.3 Illustrative frame problem Up: 3. Statically indeterminate problems Previous: 3.1 Illustrative frame problem
 , the two spans are of the same length:
, the two spans are of the same length:
 .
The rafter 2-4 is loaded with a vertical concentrated load
.
The rafter 2-4 is loaded with a vertical concentrated load
 .
The column 3-4 (of length
.
The column 3-4 (of length
 ) is loaded with a uniform load
) is loaded with a uniform load
 .
.
Assume that the value of the column flexural rigidity is
 and that of the rafter is
and that of the rafter is
 (
(
 ); the axial rigidity of the column
); the axial rigidity of the column
 and that of the rafter
and that of the rafter
 ; the shear rigidity of the column
; the shear rigidity of the column
 and that of the rafter
and that of the rafter
 .
.
We wish to compute the displacements, reactions, internal forces, and draw the axial force, shear force and bending moment diagrams.
Problem Solving.
To solve the problem, the EST method is used.
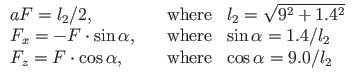
Since the element loads are described in local coordinates, we assume the directions of the local coordinates
shown in Fig. 3.10. Now we express the vertical concentrated load
 (see Fig. 3.9 b)
in local coordinates (
(see Fig. 3.9 b)
in local coordinates ( - projection onto the x-axis and
- projection onto the x-axis and  - projection onto the z-axis):
- projection onto the z-axis):
 is the length of the rafter and
is the length of the rafter and  is the force
is the force  application point in local coordinates.
application point in local coordinates.
As in example 3.1, we carry out the following steps of calculations.
1. Input data for the GNU Octave program spESTframe93LaheWFI.m are shown in excerpts from the program: element and nodal loads - excerpt 3.4; nodal coordinates - excerpt 3.5; element properties, topology and hinges - excerpt 3.6.
Number_of_frame_nodes=6 Number_of_elements=5 Number_of_support_reactions=7 spNNK=12*Number_of_elements+Number_of_support_reactions; Number_of_unknowns=spNNK Displacements and forces calculated on parts of the element 'Nmitmeks'. Nmitmeks=4 Lp=18.0; # graphics axis # --- Element properties ---
EIp=20000 # kN/m^2 EIr=40000 # kN/m^2 # EAp=4.6*10^6 EAp=4.6*10^15; #EAr=6.8*10^6; EAr=6.8*10^15 GAp=0.4*EAp; GAr=0.4*EAr; F2=16; qz5=16; L2x=sqrt(9^2+1.4^2); # length of the element sinA2=1.4/L2x; cosA2=9.0/L2x; aF2=L2x/2; Fz2=F2*cosA2; Fx2=-F2*sinA2; |
baasi0=EIp/5.6 # scaling multiplier for displacements #baasi0=1.0; #Element load in local coordinates # qz qx qA qL # Uniformly distributed load in local coordinate z and x directions LoadsqONelement=4; esQkoormus=zeros(LoadsqONelement,4,ElementideArv);
esQkoormus(1,1:4,1)=[0.0 0.0 0.0 5.6]; esQkoormus(1,1:4,2)=[0.0 0.0 0.0 L2x]; esQkoormus(1,1:4,3)=[0.0 0.0 0.0 7.0]; esQkoormus(1,1:4,4)=[0.0 0.0 0.0 L2x]; esQkoormus(1,1:4,5)=[qz5 0.0 0.0 5.6];
# # Point load in local coordinate z and x directions kN # Fz, Fx, aF (coordinate of the point of force application) LoadsF_on_Element=5; esFjoud=zeros(LoadsF_on_Element,2,ElementideArv);
esFjoud(1,1:3,1)=[0.0 0.0 5.6]; esFjoud(1,1:3,2)=[Fz2 Fx2 aF2]; esFjoud(1,1:3,3)=[0.0 0.0 7.0]; esFjoud(1,1:3,4)=[0.0 0.0 L2x]; esFjoud(1,1:3,5)=[0.0 0.0 5.6];
# #Node forces in global coordinates # sSolmF(forces,1,nodes); forces=[Fx; Fz; My] sSolmF = zeros(3,1,SolmedeArv);
#sSolmF(:,1,1)= 0.0 #sSolmF(:,1,2)= 0.0the #sSolmF(:,1,3)= 0.0 #sSolmF(:,1,4)= 0.0 #sSolmF(:,1,5)= 0.0 #sSolmF(:,1,6)= 0.0
# #s1F(1,1,1)=0.0; # force Fz #s1F(2,1,1)=0.0; # force Fz #s1F(3,1,1)=0.0; # force My # Support shift - tSiire # Support shift is multiplied by scaling multiplier tSiire = zeros(3,1,SolmedeArv);
#tSiire(1,1,1)= 0.0 #tSiire(2,1,1)= 0.01*baasi0 #tSiire(1,1,3)= 0.0 #tSiire(2,1,3)= 0.0 #tSiire(3,1,3)= 0.0 #tSiire(1,1,5)= 0.0 #tSiire(2,1,5)= 0.0
#==========
# Nodal coordinates
#==========
krdn=[# x z
0.0 0.0; # node 1
0.0 -5.6; # node 2
9.0 0.0; # node 3
9.0 -7.0; # node 4
18.0 0.0; # node 5
18.0 -5.6]; # node 6
#==========
#
#==========
# Restrictions on support displacements (on - 1, off - 0)
# Support No u w fi
#==========
tsolm=[1 1 1 0; % node 1
3 1 1 1; % node 3
5 1 1 0]; % node 5
#==========
# ------------- Element properties, topology and hinges --------- elasts=[# Element properties # n2 - end of the element # n1 - beginning of the element # N, Q, M - hinges at the end of the element # N, Q, M - hinges at the beginning of the element # EIp EAp GAp 2 1 0 0 0 0 0 1; % element 1 EIr EAr GAr 4 2 0 0 0 0 0 0; % element 2 EIp EAp GAp 4 3 0 0 0 0 0 0; % element 3 EIr EAr GAr 6 4 0 0 0 0 0 0; % element 4 EIp EAp GAp 5 6 0 0 1 0 0 0]; % element 5 # 1 - hinge 'true' (axial, shear, moment hinges) #
2. Assembling and solving the boundary problem equations (3.6), carried out by the function LaheFrameDFIm(baasi0,Ntoerkts,esQkoormus,esFjoud, sSolmF,tsolm,tSiire, krdn,selem). The program has numbered the displacements and forces of the frame element ends as shown in Fig. 3.10. The unscaled initial parameter vectors of the elements are shown in excerpt 3.4 from the computing diary.
-------- Scaling multiplier for displacements = 1/baasi0 -------- ============================================================================ Unscaled initial parameter vector Element u w fi N Q M No ---------------------------------------------------------------------------- 1 -0.000e+00 0.000e+00 1.189e-02 22.670 12.850 0.000 2 -4.721e-02 -7.343e-03 1.815e-03 16.182 -20.426 71.959 3 -0.000e+00 0.000e+00 0.000e+00 -4.870 27.275 -102.642 4 -4.721e-02 7.343e-03 2.513e-03 39.371 -7.946 46.197 5 -2.192e-15 4.778e-02 2.340e-04 -1.800 -40.125 -26.181 ----------------------------------------------------------------------------
The support reactions of the frame in global coordinates are shown in excerpt 3.5 from the computing diary.
Support reactions begin from row X: 61
===========================================
No X Node Cx <=> 1
Cz <=> 2
Cy <=> 3
-------------------------------------------
61 +1.284975e+01 1 1
62 -2.267047e+01 1 2
63 +2.727509e+01 3 1
64 +4.870101e+00 3 2
65 -1.026424e+02 3 3
66 +4.947516e+01 5 1
67 +1.800369e+00 5 2
--------------------------------------------
3. Output: the element displacements and forces determined by the transfer matrix are shown in excerpt 3.6 from the computing diary.
The bending moment M, shear force Q and axial force N diagrams of the frame EST93 are shown in Fig. 3.11.
![\includegraphics[width=85mm]{joonised/Raam93Mep.eps}](img512xx.png) [Bending moment diagram] | ||
![\includegraphics[width=95mm]{joonised/Raam93Qep.eps}](img513xx.png) [Shear force Q diagram] |
![\includegraphics[width=88mm]{joonised/Raam93Nep.eps}](img514xx.png) [Axial force N diagram] |
#================================================================================= Element displacements and forces determined by transfer matrix #================================================================================= Displacements and forces of element no 1 of length 5.600 m The element is divided into 4 parts displacement u - 0.00000e+00 -6.89971e-15 -1.37994e-14 -2.06991e-14 -2.75988e-14 displacement w - 0.00000e+00 -1.63514e-02 -3.09398e-02 -4.20022e-02 -4.77757e-02 rotation fi - 1.18894e-02 1.12598e-02 9.37089e-03 6.22270e-03 1.81524e-03 normal force N - -22.67047 -22.67047 -22.67047 -22.67047 -22.67047 shear force Q - -12.84975 -12.84975 -12.84975 -12.84975 -12.84975 moment force M - 0.00000 -17.98964 -35.97929 -53.96893 -71.95857 ---------------------------------------------------------------------------- Displacements and forces of element no 2 of length 9.108 m The element is divided into 4 parts displacement u - -4.72079e-02 -4.72079e-02 -4.72079e-02 -4.72079e-02 -4.72079e-02 displacement w - -7.34346e-03 -7.81788e-03 -4.99369e-03 2.77278e+00 2.22079e+01 rotation fi - 1.81524e-03 -9.57252e-04 -1.08203e-03 -3.65812e+00 -1.46316e+01 normal force N - -16.18166 -16.18166 -13.72234 -13.72234 -13.72234 shear force Q - 20.42597 20.42597 4.61611 4.61611 4.61611 moment force M - -71.95857 -25.44743 21.06372 31.57487 42.08602 ---------------------------------------------------------------------------- Displacements and forces of element no 3 of length 7.000 m The element is divided into 4 parts displacement u - 0.00000e+00 1.85276e-15 3.70551e-15 5.55827e-15 7.41102e-15 displacement w - 0.00000e+00 -6.64042e-03 -2.16891e-02 -3.78371e-02 -4.77757e-02 rotation fi - 0.00000e+00 6.89296e-03 9.60943e-03 8.14940e-03 2.51287e-03 normal force N - 4.87010 4.87010 4.87010 4.87010 4.87010 shear force Q - -27.27509 -27.27509 -27.27509 -27.27509 -27.27509 moment force M - 102.64244 54.91103 7.17962 -40.55179 -88.28320 ---------------------------------------------------------------------------- Displacements and forces of element no 4 of length 9.108 m The element is divided into 4 parts displacement u - -4.72079e-02 -4.72079e-02 -4.72079e-02 -4.72079e-02 -4.72079e-02 displacement w - 7.34346e-03 4.22475e-03 4.74885e-03 6.57025e-03 7.34346e-03 rotation fi - 2.51287e-03 3.98052e-04 -6.86705e-04 -7.41404e-04 2.33954e-04 normal force N - -39.37128 -39.37128 -39.37128 -39.37128 -39.37128 shear force Q - 7.94644 7.94644 7.94644 7.94644 7.94644 moment force M - -46.19719 -28.10266 -10.00814 8.08639 26.18091 ---------------------------------------------------------------------------- Displacements and forces of element no 5 of length 5.600 m The element is divided into 4 parts displacement u - -2.19175e-15 -1.64382e-15 -1.09588e-15 -5.47939e-16 0.00000e+00 displacement w - 4.77757e-02 5.02581e-01 7.35198e+00 3.70545e+01 1.17045e+02 rotation fi - 2.33954e-04 -1.30263e+00 -1.04416e+01 -3.52566e+01 -8.35876e+01 normal force N - 1.80037 1.80037 1.80037 1.80037 1.80037 shear force Q - 40.12484 17.72484 -4.67516 -27.07516 -49.47516 moment force M - 26.18091 66.67568 75.81046 53.58523 -0.00000 ----------------------------------------------------------------------------
Testing a static equilibrium for the frame
Consider a static equilibrium of the frame shown in Fig. 3.12.
Let us project the forces onto the X-axis,
The sum of the moments and the moments of the forces acting about point 1
shown in Fig. 3.12:
The elements and the sparsity pattern of matrix spA of the two-span frame are shown in Figs. 3.13 and 3.14, respectively.
![\includegraphics[width=110mm]{joonised/Raam93.eps}](img354.png)
![\includegraphics[width=110mm]{joonised/Raam93numbr.eps}](img360.png)

![\includegraphics[width=105mm]{joonised/Raam93Toed.eps}](img364.png)


![$\displaystyle \begin{array}{ll}
\Sigma M_{1} = 0;
& - 16.0\cdot 4.5 - 4.8701\cd...
...6.0\cdot 5.6\cdot 2.8= -1.44\cdot 10^{-14}{\,}[kNm] \approx 0 \quad
\end{array}$](img367.png)
![\includegraphics[width=0.80\textwidth]{joonised/RaamEST93_en.eps}](img368.png)
![\includegraphics[width=0.78\textwidth]{joonised/RaamEST93_sparse.eps}](img369.png)